K32W148開発プラットフォームのスタート・ガイド
このドキュメントの内容
-
接続
-
ソフトウェアの入手
-
ビルドと実行
-
SDKサンプルの変更
サインイン 進行状況を保存するには アカウントをお持ちでない方 アカウントを作成する。

お客様の マルチプロトコル無線対応K32W148評価キット
1. 接続
K32W148ボードを実際に使ってみましょう。ショート・ビデオで手順を視聴するか、以下に記載された詳細な手順を参考にして、作業を進めてください。
1.1 ボードの概要
K32W148ボードには、ボードのさまざまな機能をテストする診断デモが事前にプログラム済みです。このプログラムは、MCU-LINK VCOM出力を利用します。この出力は、ホスト・コンピュータへのSerial-to-USBブリッジとして機能するデバッグ・プローブ (J14) に接続され、CMSIS-DAPデバッグ・インターフェースを提供します。
1.2 シリアル・ターミナル
MCUXpresso IDE、IAR、Keilの各ツール向けに設定されているほとんどのMCUXpresso SDKサンプルやこのクイック・スタート・デモでは、表示出力用にMCU UARTを使用しています。ターミナル・アプリケーションの使用方法がわからない場合は、次のいずれかをお試しください。
MCUXpressoターミナル、Tera Termチュートリアル、PuTTYチュートリアル1.3 ボードの接続
micro USBケーブルをコネクタJ14からホスト・コンピュータまたは電源に接続して、ボードに電源を供給し、デモ・プログラムを実行します。デモは市販のBluetooth® Smart Ready製品を使用してテストできます。IoT Toolboxを使用してプロファイル機能を確認することもできます。難しい設定なしにそのまま利用する場合は、デバイスのAPP StoreからスマートフォンにIoT Toolboxをダウンロードしてください。
1.4 クイック・スタート・デモを実行する
IoT Toolboxアプリを開いたら、[Beacons(ビーコン)]アイコンを選択してビーコンがどういう機能か確認してください。ビーコンは、3つのAdvertisingチャネルで送信される接続不可能なAdvertisingパケットです。パケットには次のフィールドがあります。
- Company Identifier(会社の識別子)(2バイト):0x0025(Bluetooth SIGによって定義されたNXP ID)。
- Beacon Identifier(ビーコンの識別子)(1バイト):0xBC(Company Identifierと組み合わせることでNXPビーコンを識別できます)。
- UUID(16バイト):ビーコン・センサの一意の識別子。
- A(2バイト):ビーコン・アプリケーション・データ。
- B(2バイト):ビーコン・アプリケーション・データ。
- C(2バイト):ビーコン・アプリケーション・データ。
- RSSI at 1m(1 mでのRSSI)(1バイト):距離ベースのアプリケーションに対応できます。
2. ソフトウェアの入手
2.1 ツールチェーンをインストールする
NXPは、MCUXpresso IDEというツールチェーンを無償で提供しています。MCUXpresso v11.6.0以上をダウンロードしてください。
 MCUXpresso IDEの入手
MCUXpresso IDEの入手 別のツールチェーンを使用したい場合は?
ツールチェーンを比較する問題ありません。MCUXpresso SDKは、IARなどの他のツールをサポートしています。

2.2 MCUXpresso SDKですぐに設計を開始する
MCUXpresso SDKは無償で利用することができ、オープンソースのライセンスに基づいて、すべてのハードウェア抽象化およびペリフェラル・ドライバ・ソフトウェアのソース・コード全体が提供されます。
MCUXpresso SDKは、MCUXpresso SDKのウェブサイト (mcuxpresso.nxp.com) から直接インストールできます。[Select Development Board(開発ボードの選択)]をクリックして、評価ボードを検索します。

[Search for Hardware(ハードウェアの検索)]検索ボックスに、選択したボード「K32W148-EVK」を入力します。ボードをクリックして選択します。

右側に、K32W148-EVK用にSDKをビルドするオプションが表示されます。そのボタンをクリックして、必要なミドルウェアを追加します。

SDKをビルドするために、利用可能なミドルウェアについて[Select All(すべてを選択)]をクリックします。次に下にスクロールして[Download SDK(SDKをダウンロード)]をクリックします。「Software Terms and Conditions(ソフトウェアの利用規約)」が表示されたら、[I agree(同意する)]を選択してダウンロードを開始します。

SDKパッケージがダウンロードされたら、MCUXpresso IDEの[Installed SDKs(インストール済みSDK)]ウィンドウにドラッグ&ドロップします。

別のツールチェーンを使用する場合は、以下のリンクを使用して K32W148-EVK用のSDKリリースをダウンロードできます。

2.3 MCUXpresso Config Tools
MCUXpresso Config Toolsは、ユーザーがMCUXpresso SDKプロジェクトを新規に作成するための構成ツールの統合スイートであり、カスタム・ボード・サポート用の初期化Cコードを生成するためのピンとクロックのツールも備えています。MCUXpresso IDEの一部として、また別のIDEを使用する場合は個別ツールとして完全に統合されます。
以下の[MCUXpresso Config Toolsを入手する]をクリックして、Config Toolsインストーラを入手してください。

2.4 ドライバのインストール
MCU-Linkは、Windows 10、MacOS X、およびUbuntu Linuxオペレーティング・システム (OS) 上で実行されているホスト・コンピュータでサポートされます。各OSのMCU-Linkファームウェア・パッケージが用意されています。パッケージには、ホスト・デバイス・ドライバ、MCU-Linkファームウェア、およびCMSIS-DAPとJ-Linkファームウェア・オプションをプログラムするためのスクリプトが含まれています。
ホスト・デバイス・ドライバをダウンロードしてインストールし、MCU-Linkファームウェアをアップデートするには、次の手順に従います。
- NXPウェブサイトのMCU-Linkページに移動します。
- [Design Resources(設計・リソース)]をクリックします。次に、[SOFTWARE(ソフトウェア)]カテゴリをクリックします。互換性のある3つのOSすべての最新バージョンのインストール・パッケージが上部に表示されます。
- ご使用のホストOS用のパッケージをダウンロードしてインストールするか (Linux/MacOS)、インストーラ・プログラムを実行します (Windows)。パッケージはMCU-LINK_installer_Vx_xxxディレクトリにインストールまたは解凍されます。
- ジャンパ
JP20を短絡させて、MCU-Linkを (USB) ISPモードに切り替えます。 - USB micro-Bケーブルを使用して、ボード上の
J14コネクタをホスト・コンピュータのUSBポートに接続します。MCU-Linkは (USB) ISPモードで電源が入ります。ボードは、ヒューマン・インターフェース・デバイス (HID) クラス・デバイスとして列挙されます。 - 「Readme.txt」ファイルの「Firmware Installation Guide(ファームウェア・インストール・ガイド)」セクションに記載されている手順に従って、MCU-Linkの内部フラッシュにMCU-Linkファームウェアをプログラムします。このファイルはMCU-LINK_installer_Vx_xxxディレクトリにあります。提供されているスクリプトを使用して、CMSIS-DAPまたはJ-Linkファームウェア・オプションをプログラムします。
- ホスト・コンピュータからボードを取り外し、ジャンパ
JP20を取り外してから、ボードを再接続します。
2.5 セキュア・プロビジョニング・コマンドライン・ツール (SPSDK)
Secure Provisioning SDK (SPSDK) は、NXP MCUポートフォリオ全体で動作する信頼性が高くて使いやすいPython SDK統合ライブラリです。お客様の迅速なプロトタイピングから生産の展開までをサポートする強力な基盤を提供します。

SPSDKをインストールするには、以下の手順に従ってください。詳細や、別のOSを使用している場合は、「Secure Provisioning SDK (SPSDK)」に記載されているインストール・ガイドを参照してください
要件
必ずPython 3.7以降をインストールしてください(旧バージョンの2.xはサポートされていません)
Windowsユーザーの場合:
- SPSDKリポジトリを配置するフォルダを作成します。この例では、
C:\spsdkを使用します - リポジトリのクローンをこのフォルダに作成します
cd C:\spsdk- git clone NXP MCUXpresso GitHub Repository

- 同じフォルダ内で、仮想環境を作成してアクティブ化できます。
Python仮想環境を作成します。python -m venv venv 仮想環境をアクティブ化します venv\Scripts\activate
仮想環境がアクティブになると、現在の作業パスの横のかっこ内に仮想環境の名前が表示されます。

SPSDKを使用する場合は必ず仮想環境をアクティブ化する必要があります。毎回新しい環境を作成する必要はありません。手順3.bのみを繰り返してください。

- 依存関係をインストールします
python -m pip install --upgrade pippip install -r requirements-develop.txt
- SPSDKのインストールが正常に完了していることを確認します。次のコマンドを実行すると、完全なメニューの出力が表示されます。
spsdk –help

3. ビルドと実行
K32W148ワイヤレス・コネクティビティ・ソフトウェアには、各コネクティビティ・スタック用にすぐにコンパイルして実行が可能なデモ・アプリケーションやドライバ・サンプルが付属しています。
このプロセスについて紹介するショート・ビデオを提供しています。または、以下に記載の手順に従ってください。
3.1 MCUXpresso SDKサンプル・コードを確認する
MCUXpresso SDKには、サンプル・アプリケーション・コードが豊富に用意されています。利用可能なコードを確認するには、SDKをインストールしたフォルダのSDKボード・フォルダを参照し、「K32W148」(
特定のサンプル・コードの詳細については、サンプルのディレクトリにあるreadme.txtファイルを開いてください。
3.2 MCUXpresso SDKサンプルのビルドとデバッグ
興味のあるデモ・アプリケーションやドライバのサンプルがいくつかあれば、それをビルドおよびデバッグする方法を知りたくなることでしょう。MCUXpresso SDKのスタート・ガイドでは、SDKでサポートされているすべてのツールチェーンのデモを設定、ビルド、およびデバッグする方法について、わかりやすく手順に沿って解説しています。
以下のガイドを使用して、MCUXpresso IDEを使用してサンプル・アプリケーションを開いてビルドやデバッグを行う方法を習得してください。
MCUXpresso IDEを使用する
K32W148 SDKには、サンプル・アプリケーションが豊富に用意されています。
Cortex-M33アプリケーションのビルドとフラッシュ
次の手順では、Cortex-M33アプリケーション向けにMCUXpresso IDEを使用したhello_worldデモ・アプリケーションについて説明します。MCUXpresso IDEのインストールについては、このスタート・ガイドのセクション「2. ソフトウェアの入手」に記載されています。
- MCUXpresso IDEを開きます。
- MCUXpresso IDEウィンドウ内のビューを[Installed SDKs(インストール済みSDK)]に切り替えます。
- K32W148 SDKのzipファイルを[Installed SDKs(インストール済みSDK)]ビューにドラッグ&ドロップします
- インストールされたSDKは、以下に示すように[Installed SDKs(インストール済みSDK)]ビューに表示されます。
- 左下隅にあるクイックスタート・パネルを確認します。
- その中の[Import SDK example(s)...(SDKサンプルのインポート)]をクリックします
- サンプルをインポートして実行させるボードとして「K32W148-EVKボード」をクリックして選択し、[Next(次へ)]をクリックします。
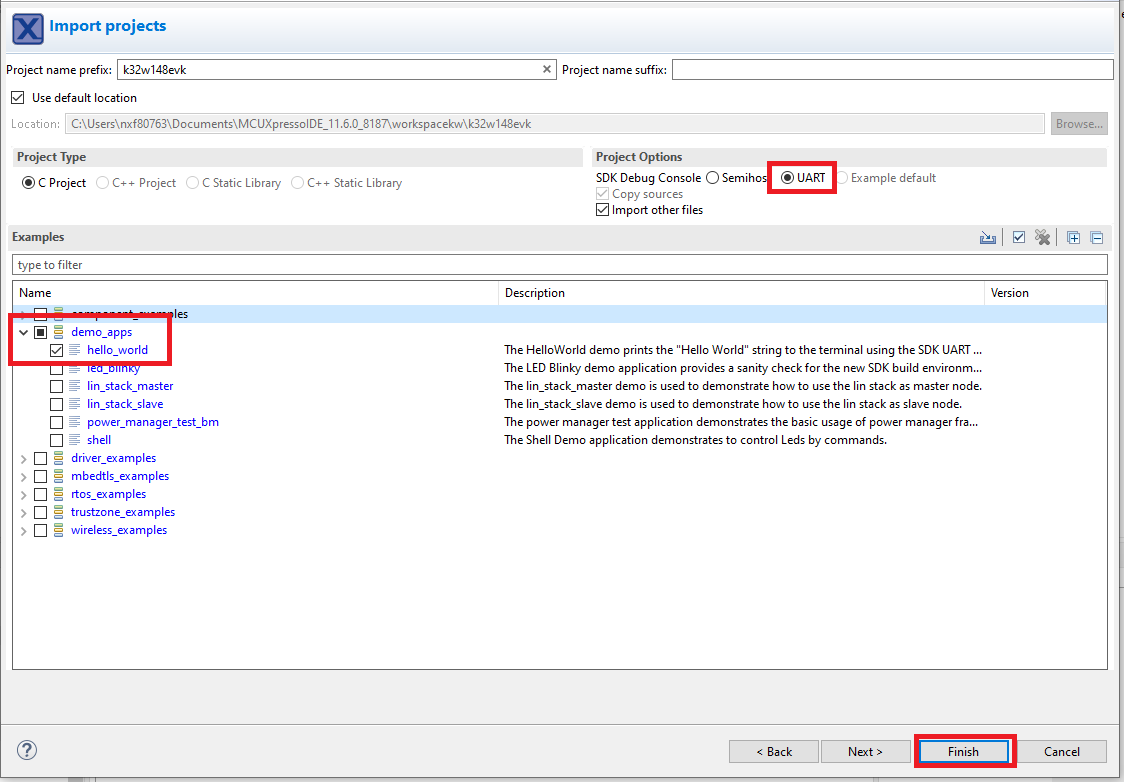
- 矢印ボタンを使用して[demo_apps]カテゴリを展開し、hello_worldの横にあるチェックボックスをクリックして、hello_worldプロジェクトを選択します。出力用にデフォルトのセミホスティングではなくUARTを使用するには、[Project Options(プロジェクト・オプション)]にある[SDK Debug Console(SDKデバッグ・コンソール)]のチェック・ボックスで[UART]を選択します。[Finish(完了)]をクリックします
- プロジェクトを選択し、ビルドします。
- プロジェクトが問題なくビルドされます。
- micro USBを
J14「LINK USB」ポートに挿入し、ボードをコンピュータに接続します。 - K32W148-EVKにアプリケーションをダウンロードします。
- J-Linkデバッグ・プローブを選択します。
- アプリケーションを実行します。










IAR EWARMを使用する
サンプル・アプリケーションのビルド
次の手順に従ってhello_worldアプリケーションを開きます。このアプリケーションのコードは、Cortex M33コアとDSPコアの両方に対応します。以下の説明では、Cortex M33コアのコンパイルとデバッグの手順を取り上げています。
DSPコードのコンパイルとデバッグの手順については、「MCUXpresso IDEを使用する」チュートリアルのセクション2に記載されています。他のサンプル・アプリケーションでは、手順がわずかに異なる場合があります。アプリケーションによってはパスのフォルダ階層が深くなるためです。
IAR Embedded Workbench for Arm 9.10以上を使用してください。
- 最初に、以前にダウンロードしたK32W148 SDKパッケージを解凍します。
- 目的のサンプル・アプリケーション・ワークスペースを開きます。ほとんどのサンプル・アプリケーション・ワークスペースのファイルは、次のパスに置かれています。
- ドロップダウン・リストから、目的のビルド・ターゲットを選択します。ここでは、「hello_world – Debug」ターゲットを選択します。
- プロジェクトを右クリックして[Options(オプション)]を選択し、プロジェクトのプロパティを開きます。
- [Debugger(デバッガ)]セクションに移動し、デバッガ・ドライバを「Jlink」に変更します。[OK]ボタンをクリックします。
- アプリケーションをビルドするには、下の図で赤色でハイライト表示されている[Make(作成)]ボタンをクリックします。
- ビルドが正常に完了します。
mu_pollingデモをサンプルとして使用する場合、パスは次のようになります。





注:ビルド・エラーが発生した場合は、正しいボードが選択されていることを確認します。プロジェクトを右クリックし、[Options(オプション)]>>[General Options(一般オプション)]>>[Target(ターゲット)]>>[Device(デバイス)]の順に進み、「NXP KW45B41Z83」を選択します。このボードはIAR Embedded Workbench for Armバージョン8.50.9以上でサポートされています。

サンプル・アプリケーションの実行
- USBケーブルを使用して、PCを開発プラットフォームの
J14「Link USB」に接続します。 - [Download and Debug(ダウンロードとデバッグ)]ボタンをクリックして、アプリケーションをターゲットにダウンロードします。
- アプリケーションがターゲットにダウンロードされると、自動的にmain()関数まで実行されます。
- [Go(実行)]ボタンをクリックすると、コードが実行され、アプリケーションが起動します。
- Cortex-M33でhello_worldアプリケーションが実行されています。


DSPアプリケーションのビルドとデバッグ
このアプリケーションのDSP部分のコードのビルドやデバッグを行うには、「MCUXpresso IDEを使用する」チュートリアルを開き、「2. DSPアプリケーションのビルド」以降の手順に従います。
3.3 ワイヤレス・サンプルのNBUのアップデート
重要
使用しているアプリケーションのSDKバージョンに対応したNBUイメージを使用する必要があります。つまり、SDKをダウンロードする場合は、ワイヤレスSDKサンプルをロードする前に、SDKの次のフォルダに用意されているバイナリを使用してNBUイメージをアップデートします。
アプリケーションの種類に応じて、異なるプロトコル・フォルダ内の適切なNBUファイルを選択します。
../middleware/wireless/ble-controller/bin
../middleware/wireless/ieee_802_15_4/bin/k32w1
NBU FWには次の2種類のイメージがあります。
- SB3ファイル・タイプ
- これはEVKユーザー専用です。EVKには、開発時の使いやすさを高めるためにセット・キーがプログラムされています。
- XIPファイル・タイプ
- これは、キーがプログラムされていないサンプル用です。これらのデバイスでは、カスタム・キーを作成してから、このXIPイメージに基づいてSB3ファイルを作成できます。

NBUをアップデートするには、SPSDKコマンドライン・ツールを使用します。
- SPSDKフォルダへのパスを開き、仮想環境をアクティブ化します。
>> venv\Scripts\activate
- デバイスをISPモードにします。この例では、USBケーブルを
J14に接続してUARTペリフェラルを使用します。EVKでは、次の方法でISPに入ることができます- ジャンパがJP25に取り付けられていることを確認します
- SW4を押したままにし、[Reset(リセット)]を押して離してから、SW4を離します。
- デバイスが接続されたら、SPSDKを使用して利用可能なデバイスを確認して、接続先のCOMポートを見つけることができます。
>> nxpdevscan
- 次に、「receive-sb-file」コマンドを実行してsb3ファイルをロードできます。
-
>> blhost -p COM27 receive-sb-file path_to_SDK\k32w1_nbu_ble_hosted_a1.sb3
-

4. SDKサンプルの変更
このプロセスについて紹介するショート・ビデオを提供しています。または、以下に記載の手順に従ってください。
4.1 MCUXpresso SDKからのサンプル・プロジェクトのクローンを作成する
オプションA:MCUXpresso IDEを使用して、サンプル・プロジェクトをインポートします。
MCUXpresso IDEを使用する
サンプル・アプリケーションのビルド
次の手順では、汎用出力の操作方法について説明します。例としてワイヤレスUARTを取り上げます。
- 左下隅にある「Quickstart Panel(クイックスタート・パネル)」を確認します
- その中の[Import SDK example(s)...(SDKサンプルのインポート)]をクリックします
- サンプルをインポートして実行させるボードとして「K32W1ボード」をクリックして選択し、[Next(次へ)]をクリックします。
- 矢印ボタンを使用して[
wireless_examples]カテゴリを展開し、次に[bluetooh]サンプルを展開したら、w_uartの横にあるチェックボックスをクリックしてサンプルを選択します。出力用にデフォルトのセミホスティングではなくUARTを使用するには、[Project Options(プロジェクト・オプション)]にある[SDK Debug Console(SDKデバッグ・コンソール)]のチェック・ボックスで[UART]を選択します。[Finish(完了)]をクリックします。 - [Project Explorer(プロジェクト・エクスプローラ)]ビューで「k32w148evk_wireless_uart_bm」プロジェクトをクリックし、前述のようにデモをビルド、コンパイル、および実行します。
- これで、IoT Toolboxを使用してワイヤレスUARTに接続できます。
- デバッグ・セッションを終了します。





オプションB:MCUXpresso Config Toolsを使用して、サード・パーティ製IDEで使用するために既存のMCUXpresso SDKのサンプルのクローンを作成します。
MCUXpresso Config Toolsを使用する
次の手順では、汎用出力の操作方法について説明します。この例では、LED点滅プロジェクトを設定し、LEDの輝度を変更します。
- MCUXpresso Config Toolsを開きます。
- 表示されるウィザードで、[Create a new configuration based on an SDK example or hello world project(SDKサンプルまたはhello worldプロジェクトに基づいて構成を新規作成する)]ラジオ・ボタンを選択し、[Next(次へ)]をクリックします。
- 次の画面で、前に解凍したMCUXpresso SDKの場所を選択します。次に、使用中のIDEを選択します。SDKのビルド時にオンラインのSDKビルダで選択されたIDEのみが利用可能になることに注意して、[clone select example(選択したサンプルのクローン)]をクリックします
- クローンの作成後、選択したディレクトリに移動し、IDEでプロジェクトを開きます。前のセクションで行ったように、プロジェクトをインポート、コンパイル、および実行します
- これにより、緑色LEDの輝度が変化します。
- デバッグ・セッションを終了します。

次に、クローンを作成するプロジェクトを選択します。この例では、GPIO LED出力プロジェクトを使用します。フィルタのボックスに「led」と入力してプロジェクトを絞り込み、「led_blinky」プロジェクトを選択します。また、プロジェクトのクローンの作成先と名前を指定することもできます。[Finish(完了)]をクリックします。

4.2 ピン・ツールの使用
次に、MCUXpresso Config Toolsの一部であるピン・ツールを使用し、プロジェクトに新しいGPIOピンを追加してLEDを点滅させる方法を紹介します。
MCUXpresso IDEのピン・ツールを使用する
MCUXpresso IDEのピン・ツールを開くには:
- 「k32w148evk_led_blinky」プロジェクトを右クリックし、[MCUXpresso Config Tools]、[Open Pins(ピンを開く)]の順に選択することで、ピン・ツールを開きます
- これで、ピン・ツールにLED点滅プロジェクトのピン構成が表示されます。


MCUXpresso Config Toolsのピン・ツールを開くには:
- MCUXpresso Config Toolsを開きます。
- 表示されるウィザードで、[Open existing configuration(既存の構成を開く)]ラジオ・ボタンを選択したら、クローンを作成したプロジェクトを選択し、[Next(次へ)]をクリックします。
- ツールバーの[Tools(ツール)]>[Pins(ピン)]を選択して、ピン・ツールを開きます。
- これで、ピン・ツールにLED点滅プロジェクトのピン構成が表示されます。



ピン・ツールを使用して、GPIOがルーティングされたピンを変更する
- 以降の手順ではMCUXpresso IDEを使用しますが、サード・パーティ製IDE向けMCUXpresso Config Toolsの場合も同じ手順で実行できます。[Pins(ピン)]ビューの[Show dedicated pins(専用ピンを表示)]および[Show not routed pins(ルーティングされていないピンを表示)]のチェックボックスのチェックを外し、ルーティングされているピンのみを表示させます。ルーティングされたピンには、ピンの名称の横に緑色のボックスが表示されます。ルーティングされた各ピンに選択された機能は、緑色にハイライト表示されます。
- 現在の設定では、GPIOAがPTA19としてルーティングされています。PTA19を無効にし、その機能を使用するためにPTA21のmux設定を変更します。
- GPIO列の下にある「GPIOA」フィールドをクリックして、PTA19を無効にします。新しいウィンドウが表示されます。「GPIOA」のチェックボックスの選択を外し、[Done(完了)]をクリックします。これによりピンが無効になります(ピンのボックスのチェックが外れます)。したがってリストからも削除されます。
- ここで、GPIOAをPTA21としてルーティングします。最初に、[Show not routed pins(ルーティングされていないピンを表示)]を選択し、すべてのピンを再表示させます。次に、[Pins(ピン)]ビューでPTA21を検索します。最後に、GPIO列の「GPIAO21」のボックスをクリックします。ボックスが緑色でハイライト表示され、ピンの横にチェックが表示されます。
- 次に、ピン・ツールによって生成された、新たに更新されたpin_mux.cファイルとpin_mux.hファイルをエクスポートして、これらの変更をプロジェクトに実装します。メニュー・バーの[Update Project(プロジェクトの更新)]をクリックします。
- ポップアップ画面に変更するファイルが表示されます。[diff]をクリックすると、現在のファイルとピン・ツールで生成された新しいファイルとの違いを確認できます。[OK]をクリックして、新しいファイルをプロジェクトに上書きします。
- 次に、IDE内で「board」フォルダの下にあるpin_mux.cファイルを開きます。
- BOARD_InitPins(void) 関数を検索します。ツールでSCTがルーティングされたピンを変更する際に、GPIAOが選択されてPTA19(緑色LED)として設定されたことに注意してください。これでGPIOAの宣言が行われ、PTA21(赤色LED)として設定されました。
- 前のセクションで行ったように、プロジェクトをビルドしてダウンロードします。
- アプリケーションを実行します。赤色LEDの輝度が変化します。
- デバッグ・セッションを終了します。




注:ヘッダーが変更されるため、クロックおよびその他のファイルも更新済みとしてタグ付けされる場合があります。



MCUXpresso IDEターミナル・チュートリアル
MCUXpresso IDEターミナル・チュートリアル
最新バージョンのMCUXpresso IDEには、ターミナル・エミュレーション・アプリケーションが含まれています。このツールは、お使いのNXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示するために使用できます。
- MCUXpresso IDEを開きます。

- MCUXpresso IDEの画面上部にある[Open a Terminal(ターミナルを開く)]ボタンをクリックするか、[Ctrl + Alt + Shift + T]を同時に押して、MCUXpresso IDEターミナルを起動します。

- [Serial Terminal(シリアル・ターミナル)]を選択します。

- シリアル・ポート(LPCXpressoのCOMポート番号を使用)をボーレート115200、8データ・ビット、パリティなし、1ストップ・ビットに設定し、[OK]ボタンをクリックします。

- 接続が確立されているか検証します。接続されている場合、MCUXpresso IDEの[Terminal(端末)]ビューの表示は下図のようになります。

- 以上で設定は完了です。
Tera Termチュートリアル
Tera Termチュートリアル
Tera Termは、広く利用されているオープン・ソースのターミナル・エミュレーション・アプリケーションです。このプログラムを使用して、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示できます。
- SourceForgeからTera Termをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します。
- Tera Termを起動します。初めて起動する際には、次のダイアログが表示されます。シリアル・オプションを選択します。ボードが接続されている場合は、COMポートが自動的にリスト内に表示されます。
- 事前に確認したCOMポート番号を使用して、シリアル・ポートをボーレート115200、8データ・ビット、パリティなし、1ストップ・ビットに設定します。この設定は[Setup(セットアップ)]>[Serial Port(シリアル・ポート)]から行うことができます。
- 接続が確立されているか検証します。確立されている場合、Tera Termのタイトル・バーに以下のように表示されます。
- 以上で設定は完了です


PuTTYチュートリアル
PuTTYチュートリアル
PuTTYは、広く利用されているターミナル・エミュレーション・アプリケーションです。このプログラムを使用して、NXP開発プラットフォームの仮想シリアル・ポートから送信された情報を表示できます。
- 下のボタンをクリックしてPuTTYをダウンロードします。ダウンロードしたら、インストーラを実行し、このウェブページに戻って手順を続行します。
- 選択したダウンロードのタイプに応じて、ダウンロードした*.exeファイルをダブルクリックするか、[Start(スタート)]メニューから選択して、PuTTYを起動します。
- 表示されたウィンドウで設定を行い、[Serial(シリアル)]ラジオ・ボタンを選択して、事前に確認したCOMポート番号を入力します。ボーレートもあわせて指定します。今回は「115200」を入力します。
- [Open(開く)]をクリックして、シリアル接続を確立します。ボードが接続されていて、正しいCOMポートが入力されていれば、ターミナル・ウィンドウが開きます。設定が正しくない場合は、アラートが表示されます。
- 以上で設定は完了です

